LiDAR Application in V2X
Author: Release time:2021-08-20 10:25:29
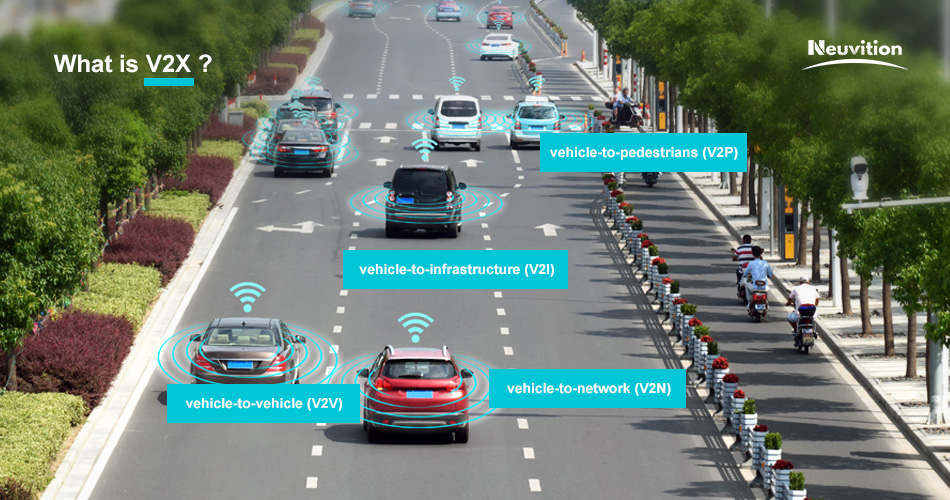
V2X,Vehicle to Everything
As a conceptual extension of the Internet of Things application, V2X is an in-depth research process of D2D (Device to Device) technology. It is a communication system between vehicles, or between cars and pedestrians, cyclists and infrastructure. V2X communication is mainly divided into three categories: V2V, V2I, and V2P. It is the core of a new generation of intelligent transportation systems (ITS). Sensors such as LiDAR, cameras, and millimeter-wave radars are used for roadside detection. LiDAR application increasingly plays an essential role in V2X.
V2X transfers part of the perception ability from the vehicles to the roadside transportation facilities. The roadside sensors provide environmental information for the vehicles through 5G and other communication methods. The importance of LiDAR Application in V2X is noticed and taken into account. In addition to replacing the roles of cameras and millimeter-wave radars in traditional traffic monitoring, LiDAR can obtain the perception beyond the visual range in the CVIS/V2X sensing components. Therefore, LiDAR lays a solid foundation for the ITS (intelligent transportation system) network and autonomous driving based on CVIS/V2X.
Based on the LiDAR application, we discover LiDAR has advantages as below:
1. transmitting and receiving light sources are not affected by sunlight and can maintain accurate sensing work 24 hours a day.
2. LiDAR detection obtains the 3D point cloud data of the target, which can output the 3D coordinates of the target.
3. Compared with the camera and millimeter-wave radar, it has better detection accuracy.
4. It can get the target information including distance, speed, movement direction, size, and height. Through data fusion with sensing devices such as cameras and millimeter-wave radars, the safety and redundancy of autonomous driving can be greatly improved.
LiDAR application for RSU and OBU
Sensors such as LiDAR, cameras, and millimeter-wave radars are used for RSU and OBU to perform data fusion through mobile edge computing (MEC) to detect various information of vehicles, non-motor vehicles, pedestrians on the road within the detection range to perform accurate detection and identification processing, obtain target position information, and then transmit the effective value through transmission information (RSU) to broadcast to the vehicles with on-board sensors (OBU) and V2X servers installed in the area to give the early warning of road condition information and to improve traffic efficiency, thereby forming a safe and environmentally friendly traffic road.
RSU (Road-Side Unit)
The roadside unit in V2X is an important part of the V2X system and the key to V2X technology. Its main function is to collect information such as current road conditions and traffic conditions, and transmit the information, through the communication network, to the commander center or RSU for processing and to decide that relevant information is transmitted to the vehicle-mounted terminal with corresponding information request through the network, to assist the driver to operate driving.
Different from OBU LiDAR applications, RSU LiDAR can provide “God’s perspective” perception. Limited by the installation location and the sensing range of a single LiDAR sensor, only installing a single LiDAR on any part of the car end will have sensing limitations. Installing multiple LiDARs on the roadside can achieve beyond-the-horizon perception, accelerating the safe implementation of V2X and autonomous driving. A typical example is that during autopilot making a left turn at an intersection, a bicycle goes straight in the target lane, and the bicycle is not within the range of the autopilot’s sensor.

OBU (On-Board Unit)
The on-board unit refers to a unit installed in the vehicle to broaden the driver’s field of vision, to increase the driver’s perception of the driving environment and vehicle operating state, and to enhance driving safety. The main technologies include information acquisition, information interaction, and accident hazard prompts, etc. The working links include: obtaining original information from various sensors and vehicle-mounted networks, and calculating the underlying information required by typical V2X applications, and transmitting it to the RSU through information interaction. Its functions include acquisition of vehicle motion status, perception of driving environment information, acquisition of vehicle positioning information, information interaction, information processing, and management, security alarm and early warning, etc.
Vehicle LiDAR is mostly used for autonomous driving. For autonomous driving, the LiDAR application has two main functions. First, after LiDAR is installed on the vehicle, it can make the vehicle reach the L2+ or L3 level, and has high-level automatic assisted driving capabilities; Second, LiDAR is installed on the road, it can accurately detect and track road, vehicles, pedestrians, and environmental data, and realize V2X for smart transportation. Based on the important value of LiDAR to RSU and OBU for autonomous driving, many companies have entered the car LiDAR in recent years.

Neuvition solid-state LiDAR can be installed at intersections, both sides of roads, expressway ramp entrance, and other road sections that need to be detected, to realize real-time monitoring of traffic participants on the road sections. With a fixed field of view, Neuvition MEMS solid-state LiDAR is very suitable for smart transportation: to process the real-time output of the vehicle features and status including length, width, height, speed, attributes, target trajectory on Neuvition V2X/CVIS based Intelligent Transportation Online System installed with intelligent algorithms, through the high-resolution, long-distance detecting of high-precision Neuvition LiDAR sensors. Neuvition LiDAR can work around the clock with high stability and durability.